先在桌面上把飞控讲透,再让学生上飞机。
很多无人机课程的风险来自“学生第一次接触飞控就直接接电机和桨”。飞控测试与开发套件把危险的动力环节隔离出来,把飞控系统拆成可观察、可测量、可复盘的模块,让课堂先建立正确的接线、参数、状态机和安全逻辑。
很多无人机课程的风险来自“学生第一次接触飞控就直接接电机和桨”。飞控测试与开发套件把危险的动力环节隔离出来,把飞控系统拆成可观察、可测量、可复盘的模块,让课堂先建立正确的接线、参数、状态机和安全逻辑。
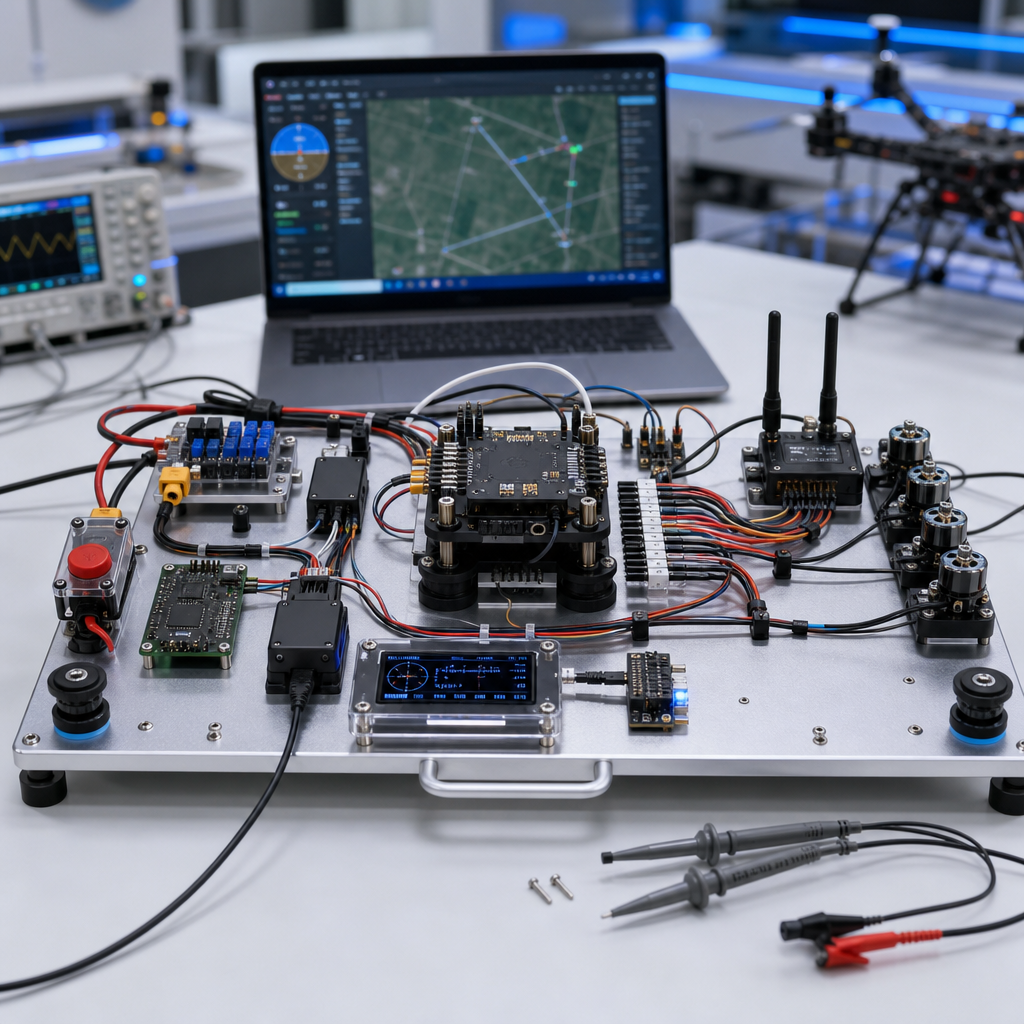
它不是一台飞机,而是一块完整的无人机大脑训练台:所有关键接口都能看见,所有实验步骤都能重复。
飞控、电源模块、GPS、数传、接收机、PWM/Servo 输出、I2C/CAN/TELEM 接口分区布置,学生可以快速理解真实无人机线束关系。
以无桨电机负载、指示灯、蜂鸣器和电源保护替代危险动力,适合课堂反复练习解锁条件、故障保护和模式切换。
保留 USB、串口、MAVLink、日志读取和外设扩展能力,适合 Python/ROS/嵌入式课程读取状态数据并编写控制实验。
按学校常见课程场景配置,可作为整机飞行平台的前置训练套件,也可独立用于飞控与通信课程。
| 核心飞控 | Pixhawk/CUAV 兼容飞控,可预装 PX4 或 ArduPilot,支持 QGroundControl / Mission Planner。 |
|---|---|
| 测试底板 | 开放式安装板、减震安装位、接口标识区、安全电源开关、供电保护与状态显示模块。 |
| 通信定位 | GPS/罗盘模块、数传电台、遥控接收机、USB 调试线,支持 MAVLink 数据读取和地面站参数配置。 |
| 安全负载 | 无桨电机测试模块、舵机/指示灯输出、蜂鸣器、可选故障注入开关盒,降低课堂调试风险。 |
| 资料课程 | 接线图、标定流程、参数模板、日志分析案例、MAVLink 示例代码、12 个以上桌面实验任务。 |
每个任务都有明确输入、操作步骤、观测数据和复盘结果,适合课堂分组与实验报告。
支持单套教师演示、学生分组实训、飞控开发课程包和实验室整机平台配套采购。